



הדרך למכונית האוטונומית ארוכה ומתארכת, ואחד החסמים בפני אוטונומיה מלאה (רמה 5) או כמעט מלאה (רמה 4) הוא זיהוי מהיר של משתמשי דרך שונים ופגיעים, בעיקר כאלה שמגיחים ממקומות לא צפויים. חוקרים מאוניברסיטת פרינסטון סבורים שיש להם פתרון מעניין לבעיה הזאת, והוא מחזיר את טכנולוגיית הרדאר (מכ"ם) אל קדמת הבמה.
נכון להיום נעשה שימוש במספר סוגי חיישנים כדי לאפשר למכונית לפענח את הסביבה ואת משתמשי הדרך האחרים, כשהנפוצים ביותר הם מצלמות (עם ראיה ממוחשבת, כמו מובילאיי), חיישני לייזר ("ליידאר"), וחיישני אינפרא אדום ואולטרא-סוניק שמסייעים ל"פיוז'ן" – שילוביות בין מספר סוגי מידע שלכל אחד ממנו מגבלות אחרות. בנוסף, אחת הטכנולוגיות הוותיקות ביותר היא רדאר, אשר מבוססת על משלוח גלי רדיו ופיענוח ההחזרים שלהם.
כל סוגי החיישנים יכולים לזהות, בתנאים שונים, עצמים נייחים וניידים שנמצאים בקו ראיה ביחס אליהם, אבל מתקשים או לא יכולים לזהות דברים מוסתרים. למשל, כאשר אנחנו עומדים ברמזור אנחנו יכולים להבחין מבעד לשמשות של מכונית שעומדת בצמוד אלינו ברוכב קורקינט או בהולך רגל שנמצא – כשהוא נייח או נייד – מעבר לה. חיישנים מקובלים, ובמיוחד כאלה שלא פועלים בשיתוף מערכת בינה מלאכותית, יתקנו לראות את מה שאדם רואה, ובוודאי יתקשו לפענח את המשמעות ואת האפשרויות שהמידע הזה מרמז עליהן.
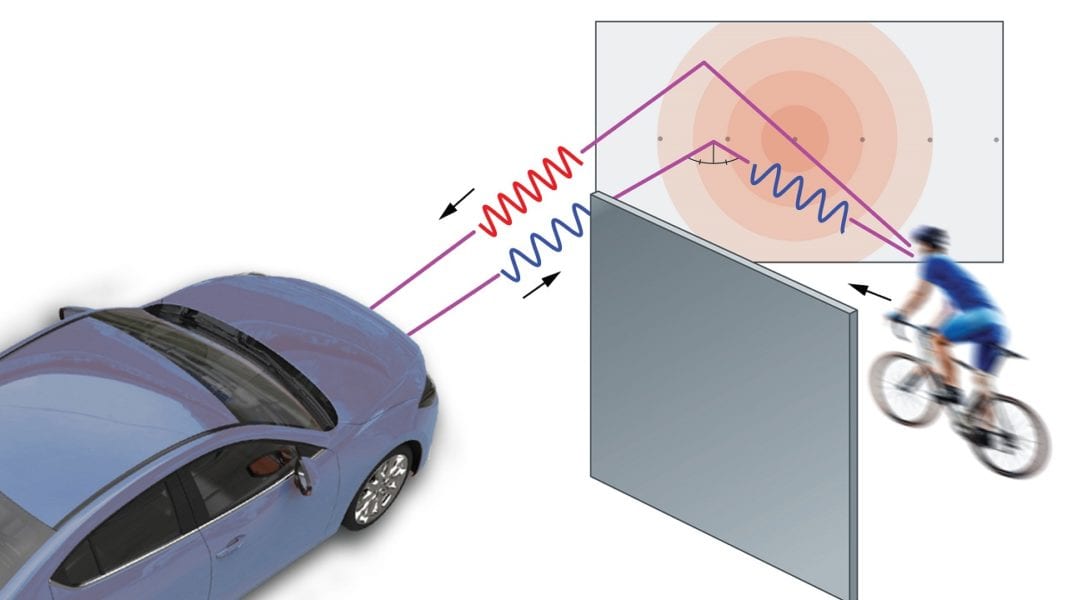
מדענים מאוניברסיטת פרינסטון בארה"ב פרסמו בשבוע שעבר פרטים מרתקים אודות טכנולוגיה שעשויה להוות מכפיל כח אדיר למערכות מכ"ם ולאפשר להן לראות ממש "מעבר לפינה", וזאת באמצעות ניצול תכונה ייחודית לשיטת הפעולה של המערכת – שהיא פיענוח החזרים.
לדבריהם, המערכת שפיתחו מבוססת על אלגוריתם ובינה מלאכותית שמסוגלים לפענח לא רק את ההחזר הרגיל והמקובל של גלי הרדאר אלא גם את הגלים שמוחזרים לאחר שהשתקפו על אובייקטים אחרים כמו בניינים או מכוניות חונות שנמצאות לפני הרכב. לטענתם, מכוניות שיצוידו בפיתוח שלהם יוכלו "להציץ" ולגלות הולכי רגל, רוכבי אופניים או מכוניות, ואז "להבין" אם אלה עצמים נייחים או ניידים, מה כיוון התנועה שלהם, ובאיזה אופן הוא צפוי להשפיע על הרכב שבו מותקנת המערכת.
במקור ניסו החוקרים להשתמש בטכנולוגיית לייזר, אולם ההחזרים שקיבלו לא היו חזקים וברורים מספיק, כדי לקבל מערכת יעילה נדרשת הקרנה בעוצמה גבוהה והחיישנים עצמם יקרים יותר. פליקס הייד, עוזר פרופסור למדעי המחשב באוניברסיטת פרינסטון, ואחד מהחוקרים שפיתחו את המערכת, אומר שהיא "תאפשר למכוניות לראות עצמים נסתרים שחיישני ליידר ומצלמות לא יכולים לקלוט. חיישני הרדאר זולים בהשוואה לחיישני ליידר, וזמינים לייצור המוני".
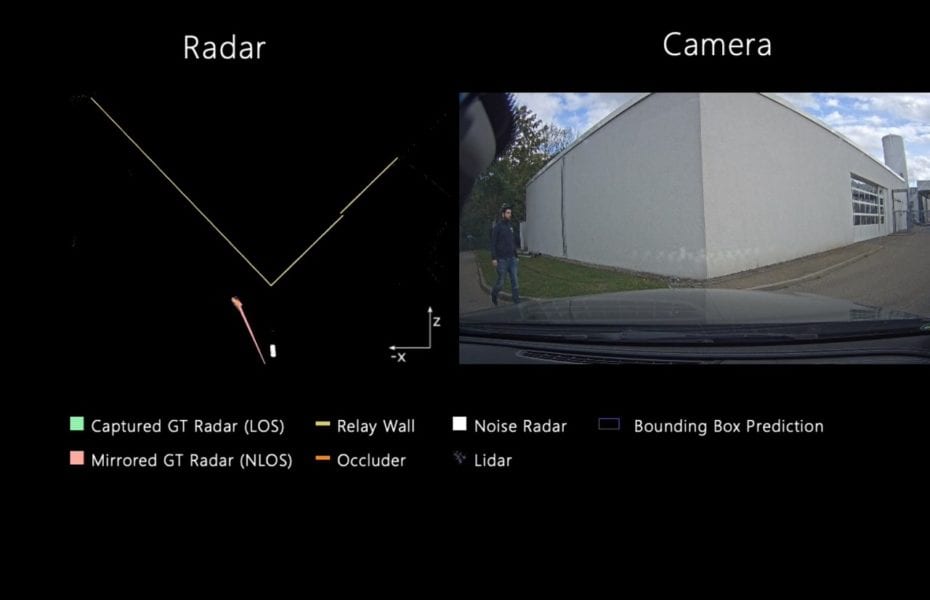
החוקרים פרסמו את המחקר שלהם במאמר שאותו הציגו לפני כשבועיים בוועידה שעסקה בראייה ממוחשבת, ושם הם תיארו כיצד המערכת מבחינה בין בני אדם ועצמים שונים בהם מכוניות, רוכבי אופניים והולכי רגל, וכיצד היא לומדת את כיוון ההתקדמות ואת המהירות שלהם. "הגישה המוצעת", הם כותבים במאמרם, מאפשרת התראה מפני הולכי רגל ורוכבי אופניים בתרחישי נהיגה אוטונומית בעולם האמיתי – עוד לפני שניתן להבחין בהם עם החיישנים הקיימים של קו ראייה ישיר".
פאנגיין וויי, סטודנט לתארים מתקדמים במדעי המחשב ואחד מכותבי המאמר, אמר כי שהמערכת הממוחשבת חייבת ללמוד להכיר רוכבי אופניים והולכי רגל מתוך כמות נתונים דלילה מאוד. "ראשית עלינו לגלות אם יש שם משהו, ואז – אם יש משהו, להבין אם זה חשוב. האם מדובר ברוכב אופניים או בהולך רגל? בשלב הבא עלינו להבין מה קורה איתו".
"האלגוריתמים שפיתחנו יעילים מאוד ומתאימים למערכות החומרה לרכב של הדור הנוכחי," אמר הייד. "אז אולי תראה את הטכנולוגיה הזו כבר בדור הבא של הרכבים… החוקרים מתכננים להמשיך לחקור במספר כיוונים ליישומים שונים, ובתוך כדי כך גם לדייק את עיבוד האותות… למערכת הזאת יש פוטנציאל לשפר באופן קיצוני את בטיחות הרכב, ומכיוון שהיא מבוססת על טכנולוגיה קיימת לא צריכה להיות בעיה לשלב אותה כבר בדור הבא של מכוניות".
המחקר נתמך חלקית על ידי תוכנית H2020 ECSEL של האיחוד האירופאי.



